TLDR: We developed a framework using DRIPS and FML (two dynamics learning techniques) to learn and correct simplified vehicle dynamics models using minimal real-world data, enabling accurate predictions for autonomous systems under time-varying control inputs.
Link: paper
The problem
Predicting the motion of an autonomous vehicle is hard. Simplified physics-based models (like the Unicycle or Bicycle models) are computationally fast, but their accuracy suffers significantly in real-world, high-speed, or aggressive driving scenarios. Core question: how do you learn these complex, time-varying dynamics accurately when you only have scarce high-fidelity data (like expensive sensor measurements) and a flawed initial physics model?
Our solution
We applied two methods to learn a trainable dynamics model that can learn from scarce data:
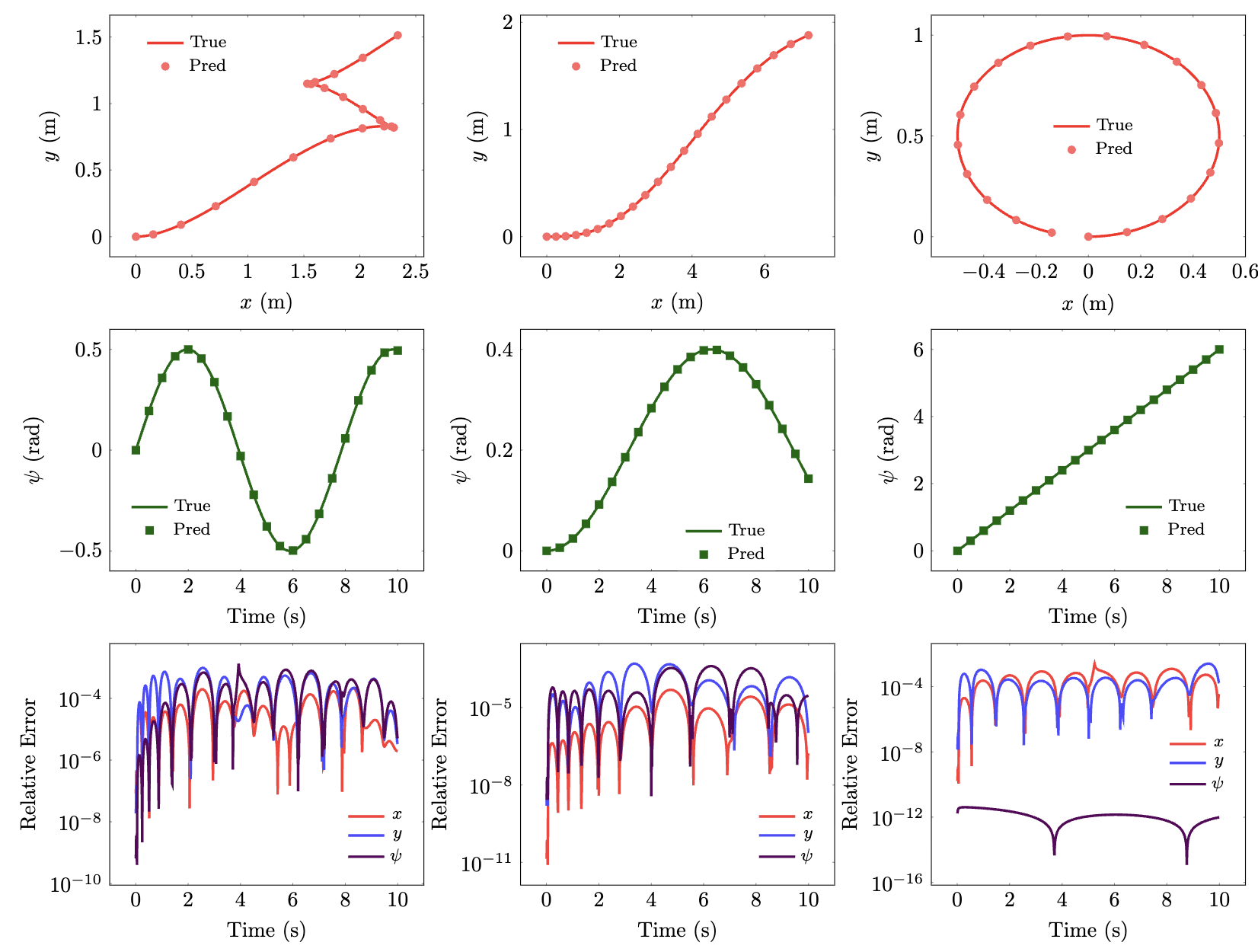
DRIPS (Dimension Reduction and Interpolation in Parameter Space): This approach uses techniques like Dynamic Mode Decomposition (DMD) to lift the dynamics into a linear space where they can be approximated by highly data-efficient surrogate models. It’s robust and works well for moderately complex systems (like the Unicycle and Simplified Bicycle models).
FML (Flow Map Learning): For strongly nonlinear systems (like the full Slip-Based Bicycle Model), we use deep neural networks (DNNs) to directly learn the dynamics model. We pretrain this model with a simple prior model, and then fine-tune the last layers with real data.
We validated our approach on multiple vehicle models, including using real-world data from an NVIDIA JetRacer.
Link: paper